BreakingBot
Description of the architecture!
Custom-built for Eurecom OS Competition (rules are available here), BreakingBot has as a brain a LEGO® MINDSTORMS® EV3 which is connected to five elements (two motors for the wheels, an ultrasonic sensor, a gyro sensor and a third motor for the pliers). All the elements are installed in order to have a robot looking like a two-wheel drive car.
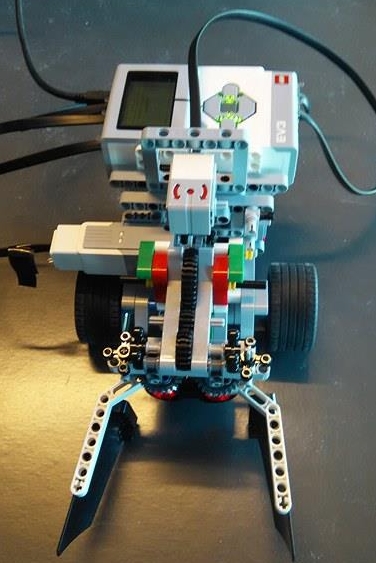
An ultrasonic sensor is placed horizontally in front of the robot. It is able to provide the distance between itself and the closest object which is in front of him.
A gyro sensor is installed in the axis of the robot.It provides the angular position of itself - and therefore of the robot.
Since the robot has to grab a ball (whose diameter is around 50mm), ingenious pliers have been used. It allows both to grab the ball and to maintain it in an upper position.
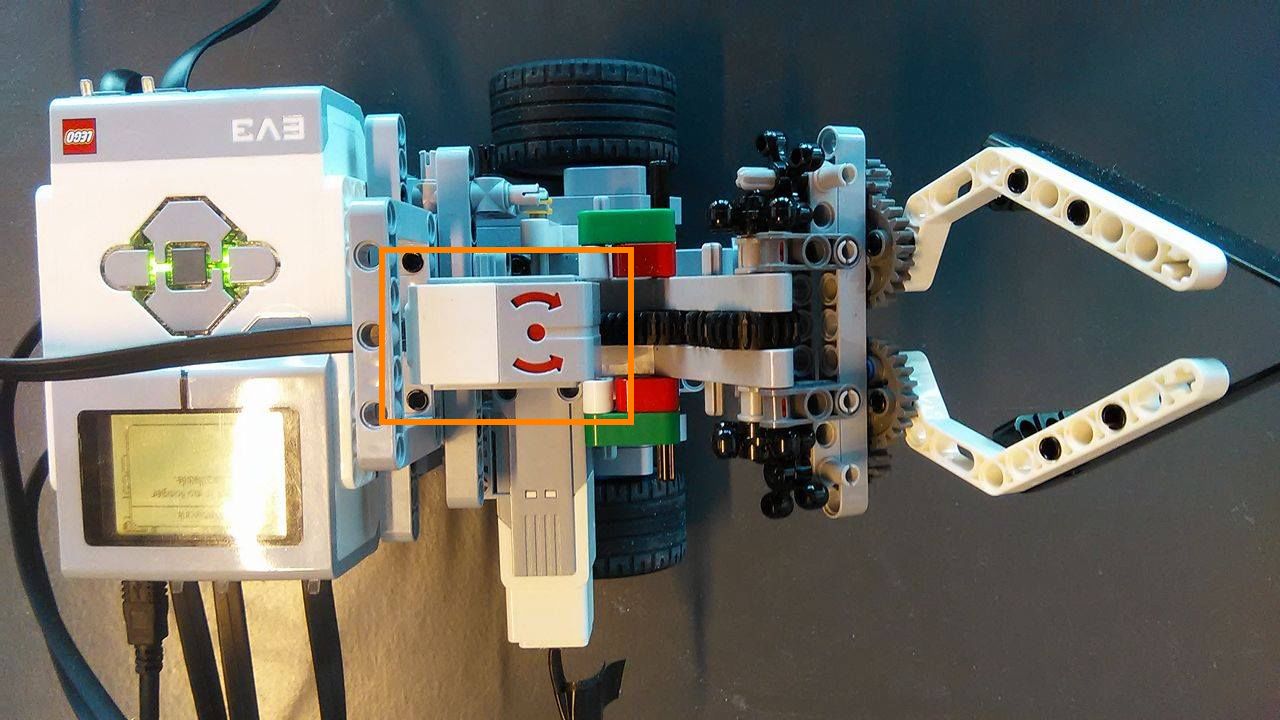
A few months ago, BreakingBot only had a plier that could grab the ball and keep it in front of it. But this plier either hid the ultrasonic sensor (which is problematic...) or had to have the sensor on itself (and then becomes too heavy to be raised by the motor). An update therefore lead to the current pliers, that is represented below:
You want to build the same plier?
=> The instructions to build those pliers can be found here.
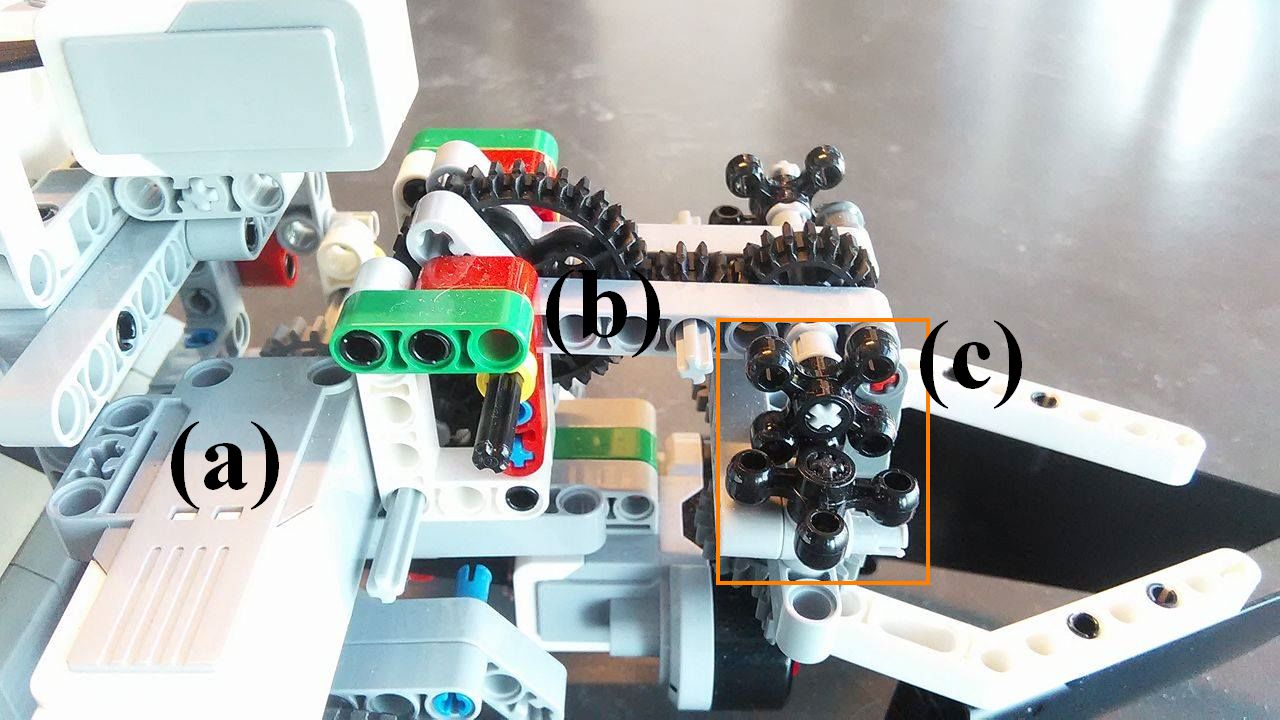
This plier is activated through the EV3 Medium Servo Motor (a). Using
several gears (b), the rotational movement is transferred forward.
Then, two symetrical combinations of two technic angular wheels (c)
which have perpendicular axes in order to change the axis of the
rotational movement.
The process that allows BreakingBot to grab a ball includes two different sequences that are produced by a single action of the motor.
Firstly, when the pliers are opened, the rotational movement which will
be created by the motor and converted by the gears will lead to the
shutting of the pliers.
Secondly, once the two arms are touching themselves (pliers closed), they provide a complete resistance which makes impossible for the technic angular wheels and for the gears to transfer any more energy. In this case, the energy provided by the motorwill raises the pliers and the ball!
The process is the same but in the opposite order when the ball is dropped by the robot.
Created by Sofiène Jerbi, Thibault Petitjean (@thib774) and Florian Kohler (@FlorianKohler)
OS Course, Eurecom 2k16